The STEP2DYNA final meeting was hosted by UoL at the Cambridge Hotel in Cambridge, United Kingdom. It took place on the 25th February 2020 and was held in conjunction with the final Workshop 6.


Due to the travel restrictions caused by the global pandemic Covid-19, the meeting was attended both in person and via Zoom video conferencing.
The meeting provided partners with an opportunity to reflect and share their progress on the milestones and deliverables for the STEP2DYNA project. In addition to this, a number of presentations were delivered by partner leads, researchers, and students as listed below. Presenters were able to demonstrate their research and share learning with others. In the afternoon, attendees had the opportunity to further network and share ideas.

STEP2DYNA Workshop 6 Agenda
Tuesday 25th February 2020
Venue: Cambridge Hotel, Cayley Suite, Granta Place, Mill Ln, Cambridge CB2 1RT, United Kingdom
- 09:30-10:00 Arrival/registration
- 10:00-10:15 Introduction by Prof Shigang Yue
Coordinator’s/WP Leader Reports
- 10:15-10:35 WP1: Collision detection visual neural systems modelling – Presented by Prof Shigang Yue UoL, Dr Yoshifumi Yamawaki KU, Dr Julieta Sztarker UBA, Dr Claire Rind UNEW.
- 10:35-10:55 WP2: Multiple visual neural systems coordination for robust collision detection – Presented by Prof Shigang Yue UoL on behalf of Dr Jigen Peng GZHU.
- 10:55-11:15 WP3: Neuro-vision sensor design, simulation and testing – Presented by Prof Shigang Yue UoL and Dr Zhihua Wang TU via video conference
11:15-11:30 Mid-morning break.
- 11:30-11:50 WP4: Collision detection and avoidance systems for robots and UAVs. Presented by Hongzhuo Liang on behalf of Dr Jianwei Zhang UHAM.
- 11:50-12:05 WP5: Joint workshops, conference and dissemination – Presented by Prof Shigang Yue UoL.
- 12:05-12:20 WP6: Project management and market exploitation – Presented by Prof Shigang Yue UoL.
Researcher Presentations
- 12:20-12:30 Assoc. Prof Junhao Xiao, guest from National University of Defense Technology – Brain-Computer Interface for Human-Multi-Robot Strategic Consensus.
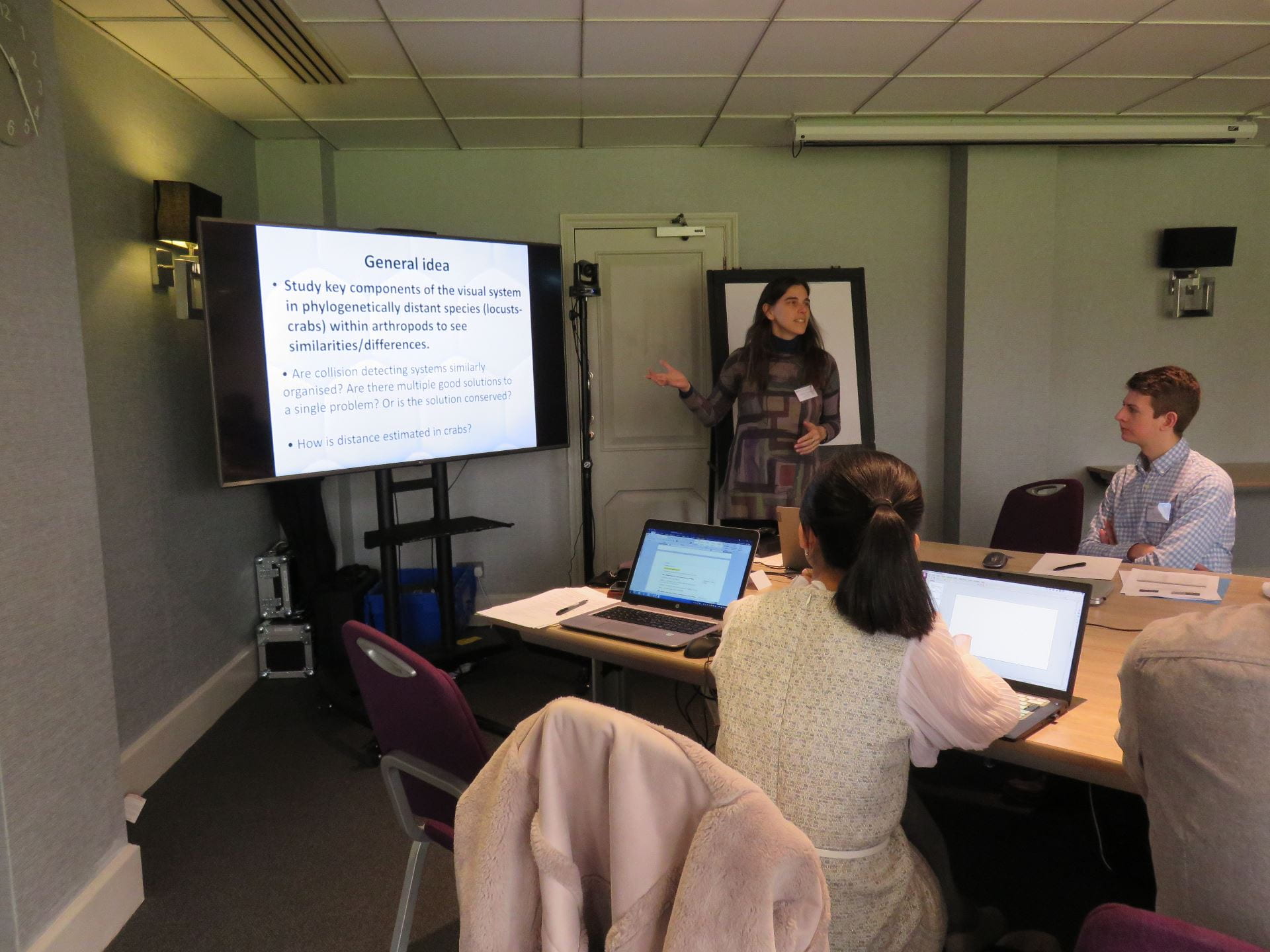
- 12:30-12:40 Dr Florencia Scarano, previously UBA, – Characterization of synapses on a collision detector neuron (MLG1) of the crab Neohelice granulate.
- 12:40-12:50 Hao Luan, student at UoL – An orientational looming detector model for MLG1 in the crab Neohelice
- 12:50-13:00 Hongzhuo Liang, student at UHAM – Vision based robotic grasping

13:00-14:00 Lunch
- 14:00-14:30 Final comments and round table
- 14:30 Meeting close
- 14:30-16:15 Afternoon excursion: Walking tour of Cambridge.
