Hamid Isakhani is a PhD scholar at the University of Lincoln. Hamid carried out two secondments under the STEP2DYNA project including 7.5 months at partner Tsinghua University and 4.5 months at partner Huazhong University of Science and Technology. Hamid has contributed to STEP2DYNA Work Package 4.
University of Lincoln researcher Hamid Isakhani virtually attended the Ubiquitous Robots (UR) 2020 Conference held in Kyoto, Japan. Like many recent conferences, this was UR’s first-ever virtual event. Organised by the Korea Robotics Society and co-sponsored by the IEEE Robotics and Automation Society, UR2020 brought together scientists and engineers across the world who are at the forefront of robotics and automation. The week-long conference held 22-26 June 2020 comprised a variety of Keynote speeches, workshops and break-out sessions. To read more about the conference you can visit the Ubiquitous Robots 2020 website, here.
Hamid presented his paper H. Isakhani, C. Xiong, S. Yue and W. Chen, “A Bioinspired Airfoil Optimization Technique Using Nash Genetic Algorithm,” 2020 17th International Conference on Ubiquitous Robots (UR), Kyoto, Japan, 2020, pp. 506-513, doi: 10.1109/UR49135.2020.9144868.
This paper was nominated for the URA 2020 Best Paper Award.

Here is what Hamid had to say about the experience:
“2020 has been no ordinary from day one. Plane crashes, earth quakes, forest fires and now the devastating pandemic has certainly changed all of our lives for good or bad (reader’s perception). What is important is that we learn, adapt, and live on. Although some of our decisions are better than the others; like the AERO 2020 conference in France being postponed by over a year due to the pandemic compelling us to withdraw our participation, KROS on the other hand decided to take the leap and conduct the 17th International Conference on Ubiquitous Robots (UR2020) in Kyoto, Japan on the originally scheduled dates virtually for the first time in its history. It was certainly challenging for both the organisers as well as the participants, yet it was a success with a lot of takeaways for everyone.
Although the core topic of our work is more related to the field of Aerospace, we were extremely pleased to learn that our work was greatly recognised by the robotics community and nominated for the best contributed paper award at UR2020.
On 25th June 2020, 09:00hrs (JST), our 10 minutes long pre-recorded presentation was played back on Zoom application for the audience who later raised their questions via the built-in Q&A tab provided on the platform. Participants had access to the audio and video of the presenter and the session Chair who communicated and sorted the posted questions through a one-on-one video call.
Online conference sceptics might argue that networking and physical meetings at an international conference is a significant advantage missing in a virtual event, especially for early career researchers. Fortunately, this feature was also thoughtfully integrated by the organisers on the Slack application where different channels were created for presenters to communicate and share opinions/contacts for a period of thirty days.
Overall, it was rather an interesting experience, although I was in my 14-days covid-19 quarantine in China, at least I didn’t have to attend my session past midnight in the UK (BST).”
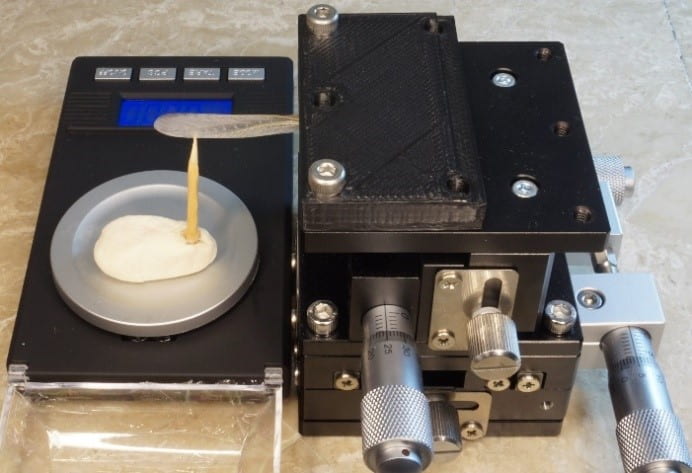
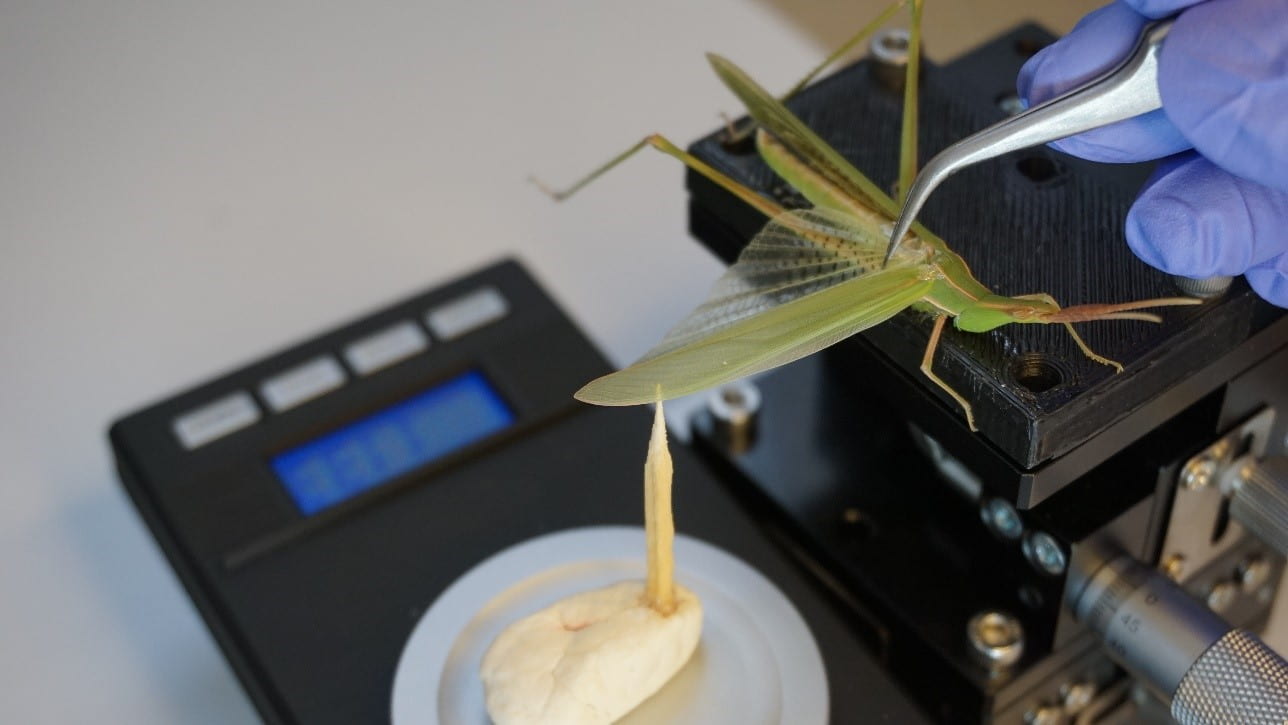
Hamid remains in China and continues his study on the effects of haemolymph on the flexural stiffness of various flying insect species. You can learn more about Hamid’s research here.